















Ausgezeichnet als
NEWSLETTER ABONNIEREN
Sie interessieren sich für die Projekte und Ergebnisse unserer Zukunftslabore? Unser Newsletter fasst die wichtigsten Ereignisse alle zwei Monate zusammen.
Jetzt anmeldenWie sich Menschen in Zukunft fortbewegen und auf welche Art und Weise Güter transportiert werden, kann nicht mit Sicherheit gesagt werden. Doch mithilfe sogenannter Zukunftsszenarien besteht die Möglichkeit, sich einen Eindruck der zukünftigen Mobilität zu verschaffen. Diese Szenarien dienen dazu, eine oder mehrere alternative Visionen für das Mobilitätssystem von morgen zu finden. Das ist wichtig für die Planung und Gestaltung kommender Infrastrukturen, Mobilitätsträger und Dienstleistungen. Mithilfe der Szenarien können komplexe Zusammenhänge verschiedener Faktoren ermittelt werden, um Abhängigkeiten und Wechselwirkungen zu erkennen und diese in die Planungen einzubeziehen. Darüber hinaus ermöglichen Zukunftsszenarien die Identifikation von Potenzialen und Herausforderungen zukünftiger Mobilitätslösungen.
Das Zukunftslabor Mobilität verknüpft verschiedene Methoden miteinander, um Zukunftsszenarien zu erstellen. Eine Möglichkeit bestand darin, in einer Studie die Vorstellungen von Jugendlichen und Erwachsenen über die Mobilität in 35 Jahren zu ermitteln. Die Jugendlichen vermuten, dass vermehrt E-Bikes und E-Lastenräder genutzt werden. Automobile werden elektrisch betrieben, autonom und unterirdisch fahren. Auch das Laden und Parken der Fahrzeuge wird unter der Erde stattfinden. Außerdem stellen sich die Jugendlichen vor, dass Pakete durch Magnetbänder ebenfalls unterirdisch zugestellt werden. Zusätzlich transportieren Notfalldrohnen Medikamente und Rettungskräfte an Einsatzorte. In der Vorstellung der Erwachsenen wird das Stadtbild stark von autonomen „Kapseln” bestimmt. Diese autonomen Kapseln werden durch eine spezielle App gerufen und fahren direkt vor der Haustür los. Das Besondere an den Kapseln ist, dass sie für längere Strecken auch an Zügen andocken können. Der Verkehr läuft nach den Vorstellungen der Erwachsenen teilweise unterirdisch. Hier parkt auch ihr privates Fahrzeug, das aber vor allem als Backup bei besonderen Ereignissen dient. Im städtischen Luftraum fliegen Paketdrohnen und Notfalldrohnen.
INITIALES BEZIEHUNGSMODELL MOBILITÄTSBEZOGENER EINFLUSSFAKTOREN
Eine weitere Möglichkeit zur Aufstellung von Zukunftsszenarien wurde durch die Auswertung von verfügbaren Studien und Szenarien durchgeführt. Die Wissenschaftler*innen sichteten Studien, die Aussagen über Mobilität für die Zeithorizonte 2020 bis 2050 treffen. Daraufhin erstellten sie einen Katalog mit Einflussbereichen, die laut Literatur das Mobilitätssystem prägen werden. Dazu zählen die fünf übergeordneten Einflussbereiche Gesellschaft, Technologien, Wirtschaft, Umwelt und Politik. Zu diesen fünf Aspekten ermittelten die Wissenschaftler*innen 19 Einflussfaktoren und über 100 Deskriptoren, welche die Einflussbereiche jeweils näher konkretisieren. Der Einflussbereich Gesellschaft lässt sich z. B. in die Einflussfaktoren Demografie, Informations- und Meinungsaustausch sowie Gruppeneinstellungen spezifizieren. Der Einflussfaktor Demografie wiederum kann gegliedert werden in Bevölkerungsentwicklung, Alters- und Gesundheitsstrukturen, usw. So entstand ein umfangreicher Katalog an potenziellen Einflüssen.
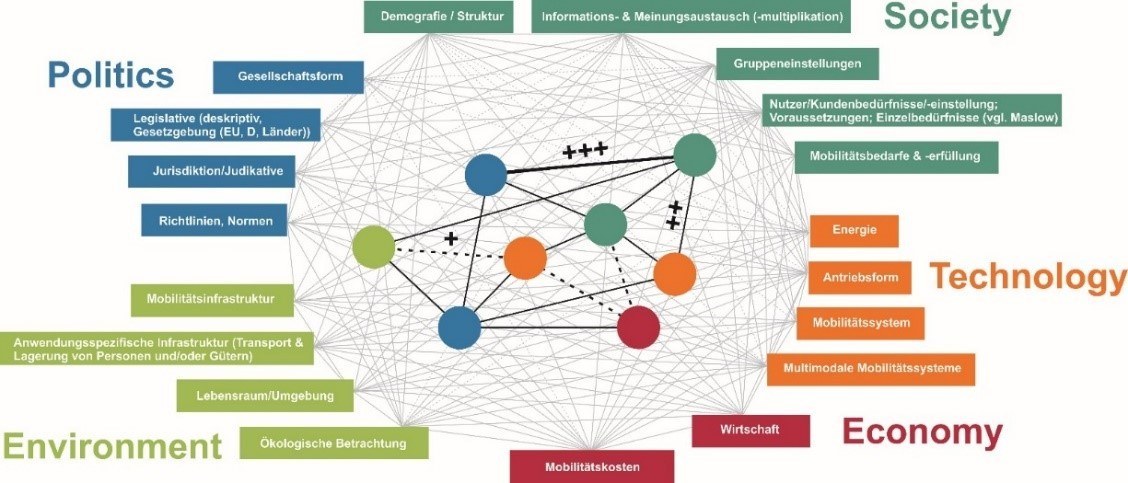
Anhand dieses Katalogs ordneten die Wissenschaftler*innen im nächsten Schritt verschiedene Zukunftsprognosen aus der Literatur den einzelnen Deskriptoren zu. Dadurch entstand eine Übersicht, die zeigt, welche Einflussbereiche, Einflussfaktoren und Deskriptoren in welcher Studie thematisiert werden und welche Zukunftsprognosen aktuell in der Kernliteratur diskutiert bzw. als Trend vorgeschlagen werden. Auf dieser Grundlage lassen sich Muster erkennen, alternative Zukunftsszenarien ableiten und individuelle Anwendungsfälle präzise beschreiben. Nachdem die Kerninformationen aus der Literatur extrahiert und aufbereitet wurden, analysierten die Wissenschaftler*innen im nächsten Schritt die Zusammenhänge zwischen den Einflussfaktoren unter Berücksichtigung der dazugehörigen Deskriptoren. Wenn sich z. B. die Verteilung der Bevölkerung auf Stadt und Land ändert (Einflussfaktor „Demografie“), dann wirkt sich diese Veränderung unmittelbar auf die Mobilitätsbedarfe und damit auf die Mobilitätsinfrastruktur im Einflussbereich „Umwelt“ aus. Solche Zusammenhänge verfeinerten die Wissenschaftler*innen in einem initialen Beziehungsmodell. Es zeigt nicht nur die Zusammenhänge der Faktoren auf, sondern stellt auch die Art (direkt oder indirekt) und die Stärke der Zusammenhänge dar. Diese grundlegenden Erkenntnisse sind relevant für die Planung zukünftiger Mobilitätslösungen. Nur wenn die unterschiedlichen Faktoren und deren Wechselwirkungen bekannt sind, können entsprechende Konzepte für Sharing und autonomes Fahren im Flächenland, für eine intermodale Mobilitätskette, für eine effiziente und sozialverträgliche letzte Meile sowie für eine intermodale Seeverkehr- und Hinterlandanbindung erarbeitet werden.
Aufbauend auf den Einflussfaktorenkatalog und dem initialen Beziehungsmodell werden wir im weiteren Verlauf der Frage nachgehen, wie alternative Zukunftsszenarien methodisch erstellt werden können, sodass die Ableitung von Anforderungen an die Mobilitätslösungen von morgen ermöglicht wird. Damit nähern wir uns Stück für Stück einem Szenario mit konkreten Anwendungsfällen, die uns als Grundlage für die Formulierung von Anforderungen unter Berücksichtigung des Megatrends Digitalisierung in weiteren Forschungstätigkeiten dienen.

QUALITÄTSSICHERUNG HOCH KONFIGURIERBARER UND KONTINUIERLICH VERÄNDERLICHER SYSTEME
Zu den Zukunftsvisionen gehören u. a. intelligente Fahrzeugsysteme und -funktionen, deren Soft- und Hardware kontinuierlich an die Bedürfnisse der Menschen angepasst und während der Nutzungsphase verbessert werden können. Wichtig dabei ist eine Qualitätssicherung der konfigurierbaren und sich kontinuierlich verändernden Systeme. Deshalb erarbeiteten die Wissenschaftler*innen ein Konzept, mit dem sie Funktionen eines Fahrzeugs nach einem Software-Update auf ihre Funktionsfähigkeit testen können. Denn nach einem Update können sich Fahrzeugvarianten (unterschiedliche Hardware-Software-Kombinationen z. B. aus Bluetooth, Dynamic Lights and Advanced Cruise Control) anders verhalten als geplant. Um nicht alle Kombinationen testen zu müssen, erstellten die Wissenschaftler*innen mittels Sampling-Algorithmen eine Teilmenge, die in einer Modellierungsumgebung getestet wurde (sogenannte X-in-the-Loop-Testmethode). Die ausgewählten Stichproben priorisierten die Wissenschaftler*innen im Rahmen des risikobasierten Testens. Dabei wird anhand von Informationen über das vorhandene System (Architektur, Testhistorie) ein Risikowert für bestimmte Systemkomponenten berechnet. Testfälle, die eine Komponente mit hohem Risikowert aufweisen, werden als Erstes ausgeführt, um kritische Systemkomponenten möglichst früh zu testen und Fehler möglichst schnell zu finden. Die Ergebnisse zeigen, dass kritische Features des Automobilsystems durch die risikobasierte Priorisierung des Samples früher getestet werden, als es normalerweise der Fall ist. Dadurch müssen weniger Konfigurationen überprüft werden, sodass Testressourcen eingespart werden können.
Moderne Regelsysteme bestehen aus vernetzten Modulen, die in einer bestimmten Hierarchie angeordnet sind. Dadurch entstehen Abhängigkeiten, die bei der Entwicklung und Absicherung von intelligenten Fahrzeugfunktionen berücksichtigt werden müssen.

MODELLBASIERTE ENTWICKLUNG INTELLIGENTER HIERARCHISCHER REGELSYSTEME IN VERNETZTEN CYBER-PHYSISCHEN SYSTEMEN
Zukünftige Fahrzeugsysteme und -funktionen in vernetzten cyber-physischen Systemen stellen, insbesondere in Hinblick auf autonome Fahrzeuge, hohe Ansprüche an die Entwicklungs- und Absicherungsmethodik. Neben funktionellen Anforderungen sind insbesondere auch gesellschaftliche Ansprüche an Sicherheit, Vernetzung und Energieeffizienz zu beachten. Um neue wissenschaftliche Ansätze bezüglich Methoden, Prozesse sowie Werkzeugen für die modellbasierte Entwicklung und Absicherung von Fahrzeugsystemen und -funktionen zu ermitteln, führten die Wissenschaftler*innen eine umfassende Literaturrecherche durch. Die Untersuchung ergab, dass bisher keine durchgängigen Methoden, Prozesse und Werkzeuge existieren, welche nachhaltig die effiziente System- und Funktionsentwicklung für intelligente, selbstfahrende Fahrzeuge unterstützen. Zudem besteht bei der Integration von Funktionen auf höheren Hierarchieebenen eine Lücke zwischen den etablierten Hardware-in-the-Loop- (HiL-)Simulationen und der realen Anwendung auf der Straße. Außerdem zeigte die Recherche, dass die herkömmliche Entwicklungsmethodik für mechatronische Systeme erweitert werden muss, damit sie den Ansprüchen für intelligente Fahrzeugsysteme und -funktionen gerecht wird. Das beinhaltet eine Erweiterung auf Prozess-Ebene (vor allem Softaware-in-the-Loop und Drivingsimulator-in-the-Loop) und auf Management-Ebene (Anforderungs-, Daten- und Bewertungsmanagement für KI-basierte Funktionen und Machine Learning). Zur Schließung der Lücke zwischen HiL-Simulationen und realen Anwendungen bei der System-Integration auf höheren Hierarchieebenen wird der Aufbau eines cyber-physischen Labortestfelds für intelligente Mobilitätsanwendungen erforderlich sein.

KONTRAKTBASIERTE VERIFIKATIONS- UND VALIDIERUNGSVERFAHREN ZUR FUNKTIONALEN ABSICHERUNG VON SOFTWARE-UPDATES
Bei der Entwicklung und Absicherung von Fahrzeugsystemen geht es auch um Software-Updates, die im laufenden Betrieb des Fahrzeugs durchgeführt werden. Um sicherzustellen, dass nach einem Update das gesamte Fahrzeugsystem intakt und funktionsfähig ist, entschieden sich die Wissenschaftler*innen mit sogenannten Kontrakten zu arbeiten. Kontrakte spezifizieren einerseits die Eigenschaften, die Systemkomponenten in ihrer Umgebung aufweisen sollen, und andererseits die Eigenschaften, die die Systemkomponenten garantieren. Mithilfe der Kontrakte können Komponenten verschiedener Hersteller über Systemebenen hinweg überprüft werden. Allerdings besteht eine große Herausforderung darin, diese Methodik vom Systementwurf auf die tatsächliche Entwicklung von Fahrzeugen im Betrieb zu übertragen. Ein zentrales Problem ist es, Kontraktabhängigkeiten automatisch nachzuverfolgen, die eventuell durch den Austausch von Komponenten betroffen sind. Die Wissenschaftler*innen haben zur Lösung des Problems eine Literaturrecherche durchgeführt und eine Fallstudie entwickelt, die prototypisch die komplexen Wechselwirkungen zwischen Kontrakten und Implementierungen beim Austausch von Komponenten zeigt. Hierfür wählten sie das Beispiel eines Überholmanövers, das mit einer bestimmen Geschwindigkeit automatisch vom Fahrzeug durchgeführt wird. Indem die Wissenschaftler*innen die Geschwindigkeit änderten, überprüften sie die Abhängigkeiten zu vor- oder nachgelagerten oder gleichzeitig stattfindenden Fahrmanövern. Sie fanden heraus, dass eine Komponente, die intuitiv leistungsfähiger ist (z. B. eine automatische Fahrfunktion mit höheren Fahrgeschwindigkeiten), im Sinne der Kontrakttheorie nicht zwingend besser ist, da sie einen schwächeren Kontrakt aufweisen kann. Für diese Kohärenz gibt es derzeit noch keine Lösung. Im weiteren Verlauf werden sich die Wissenschaftler*innen mit Mechanismen der automatischen Kontraktanpassung bei nicht kontraktidentischem Komponentenaustausch widmen.
MODELLBASIERTE REKONFIGURATION UND EVOLUTION VON SYSTEMARCHITEKTUREN
Fahrzeugsysteme wie adaptive Wankstabilisatoren, hybride Antriebsstränge oder intelligente Infotainmentsysteme werden aufgrund immer stärker vernetzter Funktionen zunehmend komplexer. Um diese Komplexität im Entwicklungsprozess handhaben zu können und eine effiziente, interdisziplinäre Entwicklung zu ermöglichen, sind Systemarchitekturmodelle von zentraler Bedeutung. Durch Architekturmodelle werden disziplinübergreifend Wirkungszusammenhänge (z. B. Wechselwirkung zwischen der Qualität eines Sensorsignals und dessen Platzierung) innerhalb der zu entwickelnden Systeme und Schnittstellen zu Umgebungssystemen aufgezeigt. Durch Wiederverwendung der identifizierten Strukturen und Wirkungszusammenhänge soll eine effiziente Handhabung der steigenden Komplexität erreicht werden und die Austauschbarkeit oder Aufwertung von Teilsystemen, z.B. während der Nutzungsphase eines Fahrzeugs (Rekonfiguration), unterstützt werden. Als Grundlage für die Entwicklung eines Lösungsansatzes für die modellbasierte Rekonfiguration und Evolution der Architekturen mechatronischer Systeme führten die Wissenschaftler*innen eine Literaturrecherche durch. Hierzu analysierten sie domänenspezifische Modelle zur Abbildung von Systemstrukturen aus unterschiedlichen Ebenen (funktionale Beschreibung, logische Dekomposition und Realisierungsstruktur) hinsichtlich Abbildungsgegenstand, abgebildeten Eigenschaften, Verwendungszweck und Darstellung. Ausgehend von dieser Analyse entwickelten die Wissenschaftler*innen ein angepasstes Rahmenwerk für die Strukturierung von Architekturmodellen im modellbasierten Entwicklungsprozess. Das Rahmenwerk unterstützt die Verortung sowie die Verknüpfung von Architekturmodellen unterschiedlicher Konkretisierungsebenen und Entwicklungsdomänen. Darüber hinaus begannen die Wissenschaftler*innen mit der Ausarbeitung einer Fallstudie, welche die durchgängige Verknüpfung von Architekturmodellen sowie Methoden für die Variation und Identifikation von Strukturmerkmalen untersuchen soll. Als Beispiel wird die angesprochene Wankstabilisierung untersucht.
DATENASSOZIATIONSMETHODE BASIEREND AUF DETERMINISTISCHEN ALGORITHMEN
Sehr relevant im Zusammenhang mit intelligenten Fahrzeugsystemen und autonomen Fahren ist die Erkennung von Objekten mithilfe von Sensoren. Im sogenannten Multi-Objekt-Tracking werden unter anderem die Positionen verschiedener Objekte wie zum Beispiel Fahrzeuge, Fußgänger*innen oder Radfahrer*innen geschätzt. Diese Schätzungen beruhen auf Objekterkennung, zum Beispiel aus Radarsensoren, Laserscannern oder Kamerabildern. Dabei ergibt sich ein Zuordnungsproblem, da nicht bekannt ist, welche Erkennung zu welchem Objekt gehört. Moderne Trackingalgorithmen betrachten jede mögliche Zuordnung, um die Messunsicherheit (also die Datenqualität) zu berücksichtigen. Die Anzahl möglicher Zuordnungen wächst allerdings exponentiell mit der Anzahl an Objekten und Messungen. Um dies zu umgehen, werden Approximationsalgorithmen eingesetzt, die eine Teilmenge aller möglichen Assoziationen berechnen und somit die Gesamtsituation möglichst gut repräsentieren sollen. Für sicherheitskritische Systeme wie das Mobilitätssystem ist es wichtig, die Funktionsfähigkeit der sensorbasierten Umfelderkennung zu testen und die Tests wiederholen zu können, um mögliche Abweichungen und Probleme zu identifizieren. Deshalb fokussierten sich die Wissenschaftler*innen bei ihren Untersuchungen auf deterministische Algorithmen. Das sind Algorithmen, die keine Zufallszahlen verwenden und dadurch bei gleicher Eingabe immer die gleichen Ergebnisse erzeugen, sodass keine Zufallseffekte entstehen wodurch die Ergebnisse verlässlich sind. Somit entwickelten die Wissenschaftler*innen eine deterministische Variante eines Algorithmus, der mögliche Zuordnungen von Objekten zu Messungen zufällig generiert mit dem wesentlichen Kriterium, dass die Ergebnisse keine Zufallseffekte aufweisen. Der entwickelte Algorithmus ist deutlich schneller als andere bereits existierende deterministische Zuordnungsalgorithmen.
Mit Approximationsalgorithmen können Probleme näherungsweise gelöst werden. Das ist hilfreich, wenn es keine genaue Lösung für ein bestimmtes Problem gibt oder eine exakte Berechnung zu aufwändig ist. Die Algorithmen können dann zumindest eine Option finden, die der optimalen Lösung möglichst nahekommt.

