


Ausgezeichnet als
NEWSLETTER ABONNIEREN
Sie interessieren sich für die Projekte und Ergebnisse unserer Zukunftslabore? Unser Newsletter fasst die wichtigsten Ereignisse alle zwei Monate zusammen.
Jetzt anmelden25.05.2021
Die Art und Weise, wie sich Menschen und Güter zukünftig fortbewegen werden, wird durch die Digitalisierung maßgeblich geformt. Zu den Zukunftsvisionen gehören u. a. intelligente Fahrzeugsysteme und -funktionen, deren Soft- und Hardware kontinuierlich an die Bedürfnisse der Menschen angepasst und während der Nutzungsphase verbessert werden können. Wichtig dabei ist eine Qualitätssicherung der konfigurierbaren und sich kontinuierlich verändernden Systeme. Deshalb erarbeiteten die Wissenschaftler*innen ein Konzept, mit dem sie Funktionen eines Fahrzeugs nach einem Software-Update auf ihre Funktionsfähigkeit testen können. Denn nach einem Update können sich Fahrzeugvarianten (unterschiedliche Hardware-Software-Kombinationen z. B. aus Bluetooth, Dynamic Lights and Advanced Cruise Control) anders verhalten als geplant. Um nicht alle Kombinationen testen zu müssen, erstellten die Wissenschaftler*innen mittels Sampling-Algorithmen eine Teilmenge, die in einer Modellierungsumgebung getestet wurde (sogenannte X-in-the-Loop-Testmethode). Die ausgewählten Stichproben priorisierten die Wissenschaftler*innen im Rahmen des risikobasierten Testens. Dabei wird anhand von Informationen über das vorhandene System (Architektur, Testhistorie) ein Risikowert für bestimmte Systemkomponenten berechnet. Testfälle, die eine Komponente mit hohem Risikowert aufweisen, werden als Erstes ausgeführt, um kritische Systemkomponenten möglichst früh zu testen und Fehler möglichst schnell zu finden. Die Ergebnisse zeigen, dass kritische Features des Automobilsystems durch die risikobasierte Priorisierung des Samples früher getestet werden, als es normalerweise der Fall ist. Dadurch müssen weniger Konfigurationen überprüft werden, sodass Testressourcen eingespart werden können.
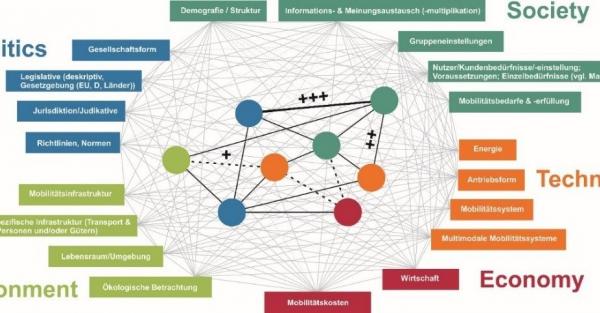
Moderne Regelsysteme bestehen aus vernetzten Modulen, die in einer bestimmten Hierarchie angeordnet sind. Dadurch entstehen Abhängigkeiten, die bei der Entwicklung und Absicherung von intelligenten Fahrzeugfunktionen berücksichtigt werden müssen.

Modellbasierte Entwicklung intelligenter hierarchischer Regelsysteme in vernetzten cyber-physischen Systemen
Zukünftige Fahrzeugsysteme und -funktionen in vernetzten cyber-physischen Systemen stellen, insbesondere in Hinblick auf autonome Fahrzeuge, hohe Ansprüche an die Entwicklungs- und Absicherungsmethodik. Neben funktionellen Anforderungen sind insbesondere auch gesellschaftliche Ansprüche an Sicherheit, Vernetzung und Energieeffizienz zu beachten. Um neue wissenschaftliche Ansätze bezüglich Methoden, Prozesse sowie Werkzeugen für die modellbasierte Entwicklung und Absicherung von Fahrzeugsystemen und -funktionen zu ermitteln, führten die Wissenschaftler*innen eine umfassende Literaturrecherche durch. Die Untersuchung ergab, dass bisher keine durchgängigen Methoden, Prozesse und Werkzeuge existieren, welche nachhaltig die effiziente System- und Funktionsentwicklung für intelligente, selbstfahrende Fahrzeuge unterstützen. Zudem besteht bei der Integration von Funktionen auf höheren Hierarchieebenen eine Lücke zwischen den etablierten Hardware-in-the-Loop- (HiL-)Simulationen und der realen Anwendung auf der Straße. Außerdem zeigte die Recherche, dass die herkömmliche Entwicklungsmethodik für mechatronische Systeme erweitert werden muss, damit sie den Ansprüchen für intelligente Fahrzeugsysteme und -funktionen gerecht wird. Das beinhaltet eine Erweiterung auf Prozess-Ebene (vor allem Softaware-in-the-Loop und Drivingsimulator-in-the-Loop) und auf Management-Ebene (Anforderungs-, Daten- und Bewertungsmanagement für KI-basierte Funktionen und Machine Learning). Zur Schließung der Lücke zwischen HiL-Simulationen und realen Anwendungen bei der System-Integration auf höheren Hierarchieebenen wird der Aufbau eines cyber-physischen Labortestfelds für intelligente Mobilitätsanwendungen erforderlich sein.
