









Ausgezeichnet als
NEWSLETTER ABONNIEREN
Sie interessieren sich für die Projekte und Ergebnisse unserer Zukunftslabore? Unser Newsletter fasst die wichtigsten Ereignisse alle zwei Monate zusammen.
Jetzt anmelden20.07.2023
Autonomes Fahren ist eine der zentralen Zukunftsvisionen der Mobilitätsbranche. Damit Fahrzeuge autonom agieren können, müssen sie mit Sensoren und Algorithmen ausgestattet werden, die das Umfeld erfassen und Fahraufgaben ableiten. Zur Umfelderfassung werden Kamera-, LiDAR- oder Radarsensoren verwendet. Die Informationen aller Sensoren werden zu einem lokalen Umgebungsmodell verschmolzen. Sensoren können aber eingeschränkt sein, z. B. aufgrund einer begrenzten Wahrnehmungsreichweite oder Verdeckung durch andere Objekte). Wenn Fahrzeuge ihre Wahrnehmungsinformationen austauschen (sog. kollektive Wahrnehmung oder Collective Perception), können die Einschränkungen behoben werden.
Mobile Verkehrsteilnehmer mit Funkmodulen wie PKW und LKW – sog. Intelligent Transport Systems Stations (ITS-S) – tauschen Informationen über die Objekte aus, die sie mithilfe der Sensoren und Kameras erkannt haben. Die Informationen beinhalten vor allem Größe, Typ und dynamischen Zustand (Richtung, Geschwindigkeit, Beschleunigung usw.) der Objekte. Die ITS-S versuchen, möglichst alle Objekte in ihrer Nähe zu erfassen und ein komplettes Modell der Umgebung zu erzeugen. Dies führt dazu, dass die ITS-S zum Teil dieselben Informationen erfassen und mehrfach redundant weiterleiten. Dadurch wird das Fahrzeugkommunikationsnetz unnötig überlastet, sodass sich die Übertragung verzögert und Informationen verloren gehen können, was wiederum das Sicherheitsrisiko erhöht.
Das European Telecommunications Standards Institute entwickelt Standards für die Übermittlung der Daten. Im Technical Report definiert das Institut, nach welchen Regeln die Informationen für die kollektive Wahrnehmung (Collective Perception Message) erzeugt werden. Es ist also festgelegt, welche Objekte in den Informationsumlauf aufgenommen werden und wann die Nachricht an die Fahrzeuge verschickt wird. Die Wissenschaftler*innen des Zukunftslabors Mobilität stellten jedoch fest, dass die Genauigkeit der Sensordaten im lokalen Umfeld zu wenig berücksichtigt wird. Deshalb erarbeiteten sie eine auf Genauigkeit basierende Regel für die Erzeugung der CPM, die die Netzauslastung reduziert und die Verfolgungsgenauigkeit der Objekte erhöht. Hierfür erstellten sie zunächst zwei Modelle: Das erste Modell basiert auf den Sensordaten des eigenen Fahrzeugs und erfasst die unmittelbare lokale Umgebung (lokales Umgebungsmodell). Das zweite Modell ergibt sich aus den Daten, die andere Verkehrsteilnehmer mit ihren Sensoren erfassen (V2X-Umgebungsmodell). Die Regel, die die Wissenschaftler*innen entwickelten, vergleicht die Tracking-Genauigkeit der beiden Modelle.
Anhand eines vordefinierten Schwellenwertes wird ermittelt, welches Modell genauer ist. Wenn die Daten des lokalen Umgebungsmodells genauer sind, dann verlässt sich das Fahrzeug auf diese Daten und ignoriert die Daten des V2X-Umgebungsmodells. Dadurch wird jeder Intelligent Transport Systems Station ermöglicht, die Objekte intelligent auszuwählen, die in die nächste Collective Perception Message aufgenommen werden. Wir konnten nachweisen, dass durch diese Methode Tracking-Fehler sowie die Kanalbelegungsrate reduziert und die Objektverfolgungsgenauigkeit erhöht werden kann.

Die kollektive Wahrnehmung kann durch sog. Road Side Units ergänzt werden. Dabei handelt es sich um feste Stationen (z. B. Funkmodule, die an Ampeln befestigt sind), die Signale verarbeiten, zusammenführen und gebündelt versenden können. Sie aggregieren Collective Perception Messages (CPM) und Cooperative Awareness Messages (CAM). CPM sind die Informationen, die fahrende Verkehrsteilnehmer über Objekte in ihrer Umgebung erfassen. CAM sind Standortmitteilungen von Fahrzeugen, die nur die eigene Position ohne Umgebungsdaten enthalten. Die Road Side Units behandeln die neuesten Sensormessungen sowie Daten zu besonders gefährdeten Verkehrsteilnehmer*innen, die nicht mit Sensoren ausgestattet sind (auch Vulnerable Road Users genannt, z. B. Fußgänger*innen und Fahrradfahrer*innen) vorrangig.
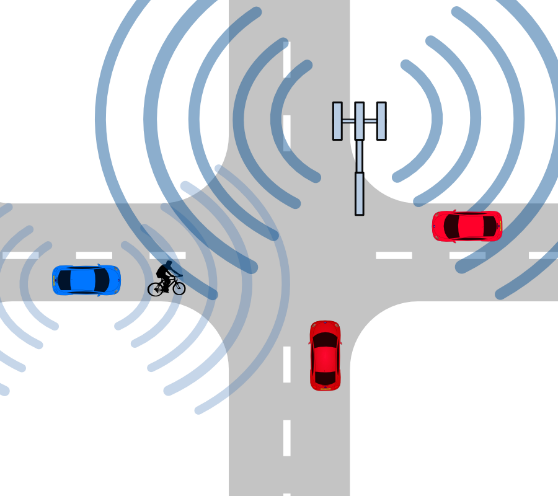
Ein weiterer Vorteil der Road Side Units ist, dass sie auch bei schwierigen Umständen bzw. Hindernissen hilfreich sind. Zum Beispiel, wenn ein Signal oder eine Funkwelle von einem Gebäude reflektiert und somit blockiert wird. Selbst wenn sich die Fahrzeuge nicht direkt sehen, wird die Signalreflexion oder Funkwellenweiterleitung von den Road Side Units verarbeitet und dadurch die Funkkommunikation der Fahrzeuge ermöglicht. Wichtig ist der Standort der Road Side Units. Damit sie die beschriebenen Funktionen erfüllen können, sollten sie vorzugsweise an Kreuzungen platziert werden.

Die Wissenschaftler*innen simulierten die V2V-Kommunikation inklusive Reflexionen von Gebäuden, wobei sie verschiedene Parameter (z. B. Bitrate, Sendeleistung, Bandbreite) betrachteten. Sie simulierten ein Szenario mit geringer und eines mit hoher Verkehrsdichte. Dabei kam heraus, dass die Road Side Units zur besseren Umfelderkennung an städtischen Kreuzungen beitragen und somit die Erkennung gefährdeter Verkehrsteilnehmer*innen erhöhen. Zudem wurde deutlich, dass mit steigender Anzahl kommunikationsfähiger Fahrzeuge (IT-S) die Umfelderfassung verbessert wird. Darüber hinaus zeigte die Untersuchung, dass die Umgebung in ruhigen Verkehrssituationen leichter erfasst werden kann als in komplexen Verkehrssituationen. Neben diesen positiven Ergebnissen stellten die Wissenschaftler*innen fest, dass die Road Side Units die Last des Funkkanals erhöhen. Dadurch sinkt die Zustellungsrate der Datenpakete (zu viele Informationen stören den Kanal). Wenn die Road Site Units die Verbreitungsfrequenz der Collective Perception Messages intelligent anpassen, kann die Verlässlichkeit der Datenpakete verbessert werden.
Im kommenden Jahr werden die Wissenschaftler*innen weiter an der genauigkeitsbasierten Nachrichtenpriorisierung arbeiten. Bisher hatten sie die entwickelte Methode an einem Highway getestet. Nächstes Jahr werden sie die Methode in einem urbanen Szenario prüfen. Bezüglich der Road Side Units werden die Wissenschaftler*innen die Regeln zur Generierung von Nachrichten intelligenter machen und die Regeln zur Nachrichtenweiterleitung verbessern. Außerdem wollen sie bewerten, wie relevant die erkannten Objekte für andere Verkehrsteilnehmer*innen sind.
